入门客AI创业平台
(我带你入门,你带我飞行)
课程搜索
老师搜索
文章搜索
手册搜索
手册文章
搜索
入门客AI创业平台首页
学习手册
在线课程
博文笔记
博客笔记
当前位置:
入门客AI创业平台
>
博文笔记
【
】
在ROS中开始自主机器人仿真 - 1 让turtlebot跑起来
2017-04-12
借助ROS的工具箱让turtlebot在gazebo中运行起来. 1. 在gazebo中显示机器人 roslaunch turtlebot_gazebo turtlebot_world.launch 默认加载了一个playground 的world文件. 2.
【
】
基于qualcomm平台的kinect应用系列一之Turtlebot(自动跟随机器人)下篇
2016-11-02
前两篇博客( 《基于qualcomm平台的kincet应用系列一之Turtlebot(自动跟随机器人)上中篇》),我们给大家介绍了如何在基于qualcomm的410c开发板搭载ko
【
】
Turtlebot(Kuboki)+Kinect+Huyoko建立gmapping地图,实现自主避障导航
2017-02-10
这篇文章主要介绍如何使用Turtlebot(Kuboki) + Kinect + Hokuyo建立gmapping地图,并且实现边建图编导航,最后使用ros map命令保存生成的地图。设备清单:1、T
【
】
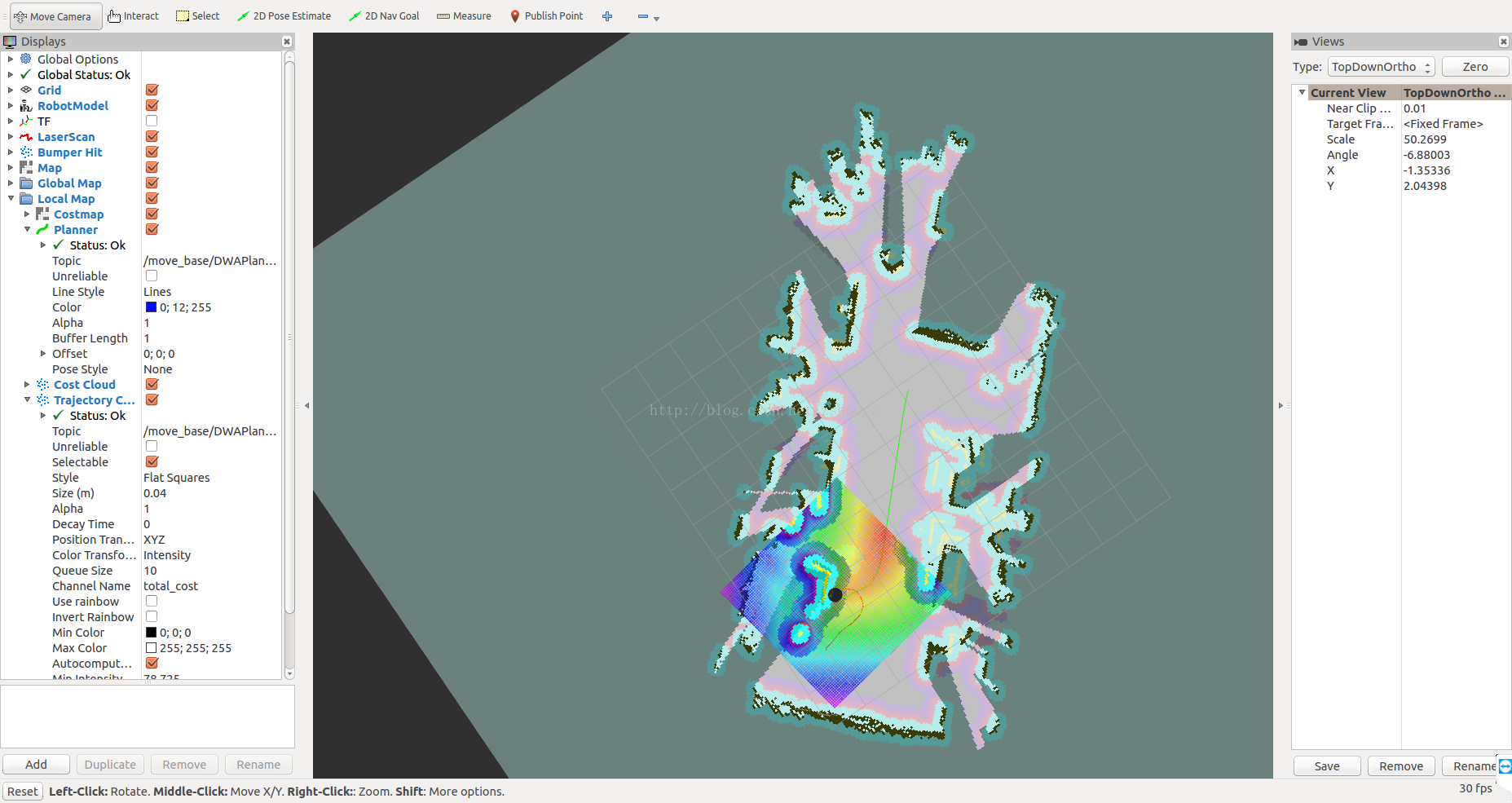
Ubuntu 14.04 + ROS Indigo+Turtlebot2(Kuboki)+Kinect+Huyoko建立gmapping地图,实现自主避障导航
2017-07-02
原文地址 :http://blog.csdn.net/zshouyi/article/details/54962374 这篇文章主要介绍如何使用Turtlebot(Kuboki) + Kinect + Hokuyo建立gmapping地图,并且实现边建图编导
04
2017-11
【
】
turtlebot 利用cartographer 建图
2017-11-04
1、假设你已经成功编译cartographer, cartographer_ros, cartographer_turtlebot, ceres_solver 2、成功安装雷达驱动 3、turtlebot_urg_lidar_2d.launch 里面的内容 4
【
】
[仅供个人参考系列]php中array与对象的区别
2018-03-24
完整的实现可以看这篇文章:PHP数组/Hash表的实现/操作、PHP变量内核实现、PHP常量内核实现这里截图说明一下zval结构体相关的图:
【
】
【PHP7内核剖析】面向对象-类的实现及编译
2017-03-31
更多《PHP7内核剖析》系列文章:https://github.com/pangudashu/php7-internal 目录: 3.4.1.1 类的结构及存储 3.4.1.2 类常量 3.4.1.3 成员属性 3.4.1.4 成员方法 3.4.1.5 类的
【
】
PHP内核--源码安装与介绍
2016-10-21
获取PHP源码 为了学习PHP的实现,首先需要下载PHP的源代码。下载源码首选是去PHP官方网站http://php.net/downloads.php下载, 如果你喜欢使用svn/git等版本
【
】
远程连接阿里云主机服务器(Linux系统)
2017-09-18
前言: 阿里云服务器主要有两种系统,Windows或者是Linux,如果是Windows操作系统,可以直接使用Windows XP、Win 7自带的“远程桌面连接”工具进行连接
19
2016-03
【
】
html中table的使用(2)一般数据表
2016-03-19
数据表 *{margin:0;padding:0;} table{ margin:10px; width:80%; border-left:1px solid #666666; border-bottom:1px double #666666; } caption{ border-right:1px solid #666; border-
首页
上一页
3048
3049
3050
3051
3052
3053
3054
3055
3056
3057
下一页
末页
热门文章
php大讲堂系列1《什么是php》
PHP 面向对象
「论坛技术求助区-精华帖」DIV+CSS...
php应用:平台搭建PHP开发环境:PHP...
sql中HAVING的使用说明
JAVA java Java基础编程之多态与继承...
Java入门教程系列「1」Java基本数据...
Java知识点总结之第一个Java程序
新手看Java,Java的基本特点
自己几分钟动手搭建一个简易的Spr...
最新文章
剑指 Offer - 8:跳台阶
Netty权威指南_札记02_NIO编程
mysql时间属性之时间戳和datetime之...
虚拟现实或许可以拯救古埃及的“...
spring cloud服务注册中心eureka---集群...
Java SE 第六章
HTTP请求+数据库
HIDL学习笔记之HIDL C++(第二天)
ubuntu系统下指定tomcat运行时为JDK1.8...
Play Framework Web开发教程 16 处理HTT...
copyright © 2008-2019 入门客AI创业平台 版权所有 备案号:
湘ICP备2023012770号



![[仅供个人参考系列]php中array与对象的区别](https://img-blog.csdn.net/20180324213435718)