入门客AI创业平台
(我带你入门,你带我飞行)
课程搜索
老师搜索
文章搜索
手册搜索
手册文章
搜索
入门客AI创业平台首页
学习手册
在线课程
博文笔记
博客笔记
当前位置:
入门客AI创业平台
>
博文笔记
【
】
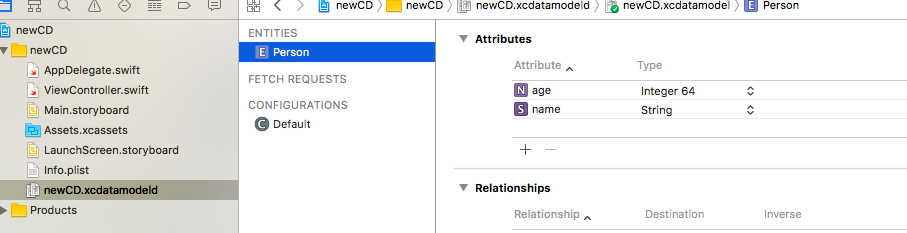
Swift 3.0 使用Core Data
2016-10-02
swift版本:3.0 Xcode版本:8.0 iOS版本:10.0 自iOS10 和swift3.0 之后,苹果的访问CoreData的方法发生了很大改变,简洁了许多,下面的内容是从0开始建立一个entity,
02
2016-08
【
】
09.SpringMVC 拦截器 - HandlerInterceptor
2016-08-02
基本概念 Interceptor(即处理器拦截器、拦截器),类似于 Servlet 开发中的过滤器 Filter,用于对处理器(Controller)进行预处理和后处理。 常见的应用场景:
【
】
SpringMVC的拦截器(Interceptor)和过滤器(Filter)的区别与联系
2016-12-22
(1)过滤器: 依赖于servlet容器。在实现上基于函数回调,可以对几乎所有请求进行过滤,但是缺点是一个过滤器实例只能在容器初始化时调用一
【
】
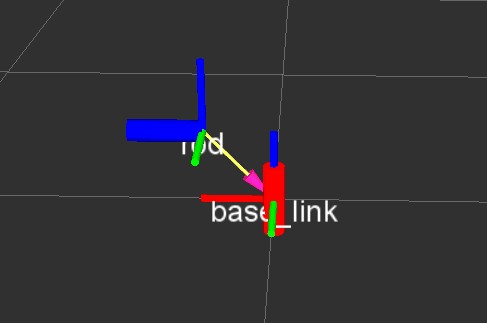
ROS 学习系列 -- 使用urdf创建机器人模型在Rviz中3D观察 之一 link使用
2015-01-18
使用ROS强大的机器人功能,建立ROS可以识别的机器人模型是第一步,也是无法绕过去的环节。Unified Robot Description Format (URDF) 就是描述机器人硬件尺
【
】
URDF通用机器人格式化描述文件学习笔记
2016-03-08
一、添加依赖CMakelist.txt的find_package中增加urdf依赖。package.xml中增加urdf依赖:urdf urdf二、写一个urdf文件一般的urdf文件test.urdf起来像是这样:
15
2017-02
【
】
robot_state_publisher启动失败处理方法
2017-02-15
rosrun robot_state_publisher robot_state_publisher /opt/ros/hydro/lib/robot_state_publisher/robot_state_publisher: error while loading shared libraries: liborocos-kdl.so.1.2: cannot open shar
【
】
ROS 学习系列 -- 执行turtlebot navigation的方法
2015-11-19
我们讲一下如何使用现有的turtlebot launch文件来启动navigation,并在PC上使用rviz指挥。1. 网络环境布置turtlebot单片机我们使用的是firefly,rviz运行在PC上
【
】
ROS探索总结(四)——简单的机器人仿真
2013-04-30
前边我们已经介绍了ROS的基本情况,以及新手入门ROS的初级教程,现在就要真正的使用ROS进入机器人世界了。接下来我们涉及到的很多例程
【
】
urdf 学习与制作
2016-08-28
http://blog.csdn.net/sunbibei/article/details/52297524 在定义好了机器人的骨架后, 进一步我们可以使用origin子标签进行定义link所应该在的位置. 但是有一点
27
2017-06
【
】
Scala Seq示例
2017-06-27
序列 Seq 序列有一个给定的顺序。 scala> Seq(1, 1, 2) res0: Seq[Int] = List(1, 1, 2) (请注意返回的是一个列表。因为Seq是一个特质;而列表是序列的很好
首页
上一页
2459
2460
2461
2462
2463
2464
2465
2466
2467
2468
下一页
末页
热门文章
php大讲堂系列1《什么是php》
PHP 面向对象
「论坛技术求助区-精华帖」DIV+CSS...
php应用:平台搭建PHP开发环境:PHP...
sql中HAVING的使用说明
JAVA java Java基础编程之多态与继承...
Java入门教程系列「1」Java基本数据...
Java知识点总结之第一个Java程序
新手看Java,Java的基本特点
自己几分钟动手搭建一个简易的Spr...
最新文章
剑指 Offer - 8:跳台阶
Netty权威指南_札记02_NIO编程
mysql时间属性之时间戳和datetime之...
虚拟现实或许可以拯救古埃及的“...
spring cloud服务注册中心eureka---集群...
Java SE 第六章
HTTP请求+数据库
HIDL学习笔记之HIDL C++(第二天)
ubuntu系统下指定tomcat运行时为JDK1.8...
Play Framework Web开发教程 16 处理HTT...
copyright © 2008-2019 入门客AI创业平台 版权所有 备案号:
湘ICP备2023012770号